高精度定位技术是当今科技领域重要研究方向之一。在物联网时代,几乎所有的应用场景都与位置信息服务有关,尤其是对于移动物体,定位需求更为重要,因此定位技术受到了广泛的关注。
提起定位,大家都会想到GNSS(全球卫星导航系统)定位。GNSS(Global Navigation Satellite System)是多个卫星系统的总称,包括中国的北斗BDS、美国的GPS、俄罗斯的GLONASS、欧洲的GALILEO、日本的QZSS和印度的IRNSS。
GNSS定位基本原理
GNSS卫星以导航电文形式发送星历参数和时间信息,用户接收机跟踪测量卫星信号,通过信号在空中传播时间和速度,计算出用户接收机到GNSS卫星的距离,基于卫星的星历计算出GNSS卫星的空间瞬时坐标,根据距离空间交会的方法,推算出用户接收机的空间三维坐标(x,y,z)。
用户接收机时钟源存在钟差,是影响定位精度主要误差之一,为此引入钟差△tj,所以需要至少接收4颗卫星才能推算出用户接收机的位置坐标。

图1 GNSS定位基本原理
(x-x1)2+(y-y1)2+(z-z1)2=(ρ1+△ρ1+△ρ2+ C•△tk- C•△tj)2
(x-x2)2+(y-y2)2+(z-z2)2=(ρ2+△ρ1+△ρ2+ C•△tk- C•△tj)2
(x-x3)2+(y-y3)2+(z-z3)2=(ρ3+△ρ1+△ρ2+ C•△tk- C•△tj)2
(x-x4)2+(y-y4)2+(z-z4)2=(ρ4+△ρ1+△ρ2+ C•△tk- C•△tj)2
(xi,yi,zi) :卫星坐标(i=1,2,3,4);
(x,y,z) :接收机坐标,未知;
△tj:接收机钟差,未知;
△tk:卫星钟差,可修正(k=1,2,3,4);
C:光的传播速度;
ρi:接收机实际测得的伪距(i=1,2,3,4);
△ρ1:电离层延迟误差,可修正;
△ρ2:对流层延迟误差,可修正。
从上面公式可知,接收机时钟源稳定度直接影响定位测算精度,接收机时钟源稳定度越高,测算出接收机位置精度也越高。
GNSS数据误差
卫星下发的信号到达用户接收机,经过电离层、对流层、反射物,最终抵达用户接收机,而并非通过真空直达,因此接收机测量结果与其真实的位置有一定差距,称为伪距。

图2 GNSS误差来源
GNSS数据误差可分为四类:与卫星有关的误差、与信号传播有关的误差、与接收机有关的误差以及与地球转动有关的误差。
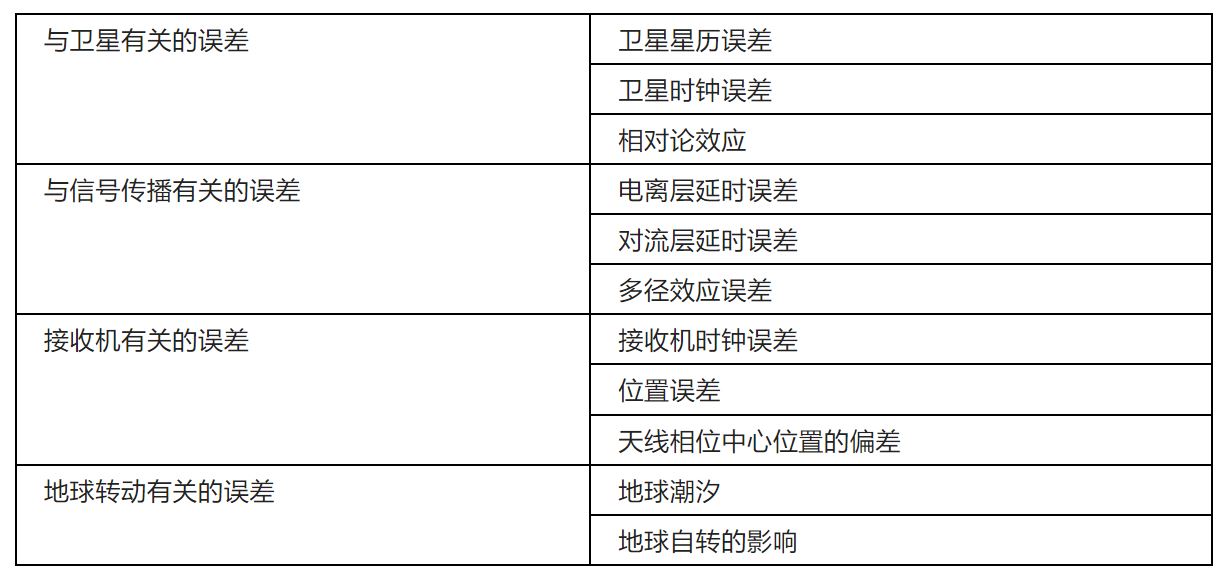
表1 GNSS误差来源
1、卫星星历误差
由星历给出的卫星位置与卫星实际位置之差称为卫星星历误差。卫星采用原子钟作为基准时钟源,卫星星历误差主要由卫星钟差、频偏、频漂等产生。
改进措施包括忽略轨道误差、通过轨道改进法处理观测数据、采用精密星历和同步观测值求差等方法。
2、电离层延迟误差
由于大气层中的中性分子受太阳辐射的影响发生电离,产生大量的正离子与电子,电磁波的传输速率与电子密度有关,因此真空中电磁波的传播速度乘以信号传播时间得到的距离,与卫星和用户接收机间的真实几何距离不相等,误差范围可达50m~150m。
改善措施包括双频观测、电离层模型辅助修正和同步观测值求差等方法。
3、对流层延时误差
由于气候、大气压力、温度、湿度等变化,电磁波在对流层传播速度和路径都会受到影响,误差范围可达2.3m~20米。
改善措施包括数学模型、参数、同步、测量等方法。
4、多径效应误差
卫星信号下发给接收机,通过不同路径直达或经过反射物抵达用户接收机,信号相互叠加产生干扰,使原信号失真、误码、信号衰落,称之为多径效应,也是卫星定位的主要误差源之一。
改善措施包括接收机选址、天线设计、天线极化等方法削弱该误差。
5、接收机误差
接收机的误差主要来自时钟源钟差、频偏、频漂等,造成测算定位不准确,也是主要误差源之一。
改善措施包括采用高稳晶振做接收机本振时钟源、改进接收机电路设计等方式消除误差。
GNSS定位技术由于受到卫星钟差、电离层、对流层、多径效应、用户接收机钟差等影响,测算得到伪距误差范围在米级,无法满足自动驾驶等应用场景高精度定位需求。如何提高定位精度呢?可以采用差分GNSS定位技术。
差分GNSS定位基本原理
在位置已精确测定的已知点上配一台基准站,和用户(移动站)同步进行GNSS观测,将得到的单点定位结果与基准站坐标比较,求解出实时差分修正值。

图3 差分GNSS定位基本原理
差分GNSS定位可分为位置差分、伪距差分和载波相位差分。其中,载波相位差分基于实时处理两个测站载波相位观测量的差分方法,定位精度达到厘米级甚至毫米级。
载波相位差分:又称RTK(Real-time Kinematic)实时动态载波相位技术,即将基准站采集的载波相位发给用户接收机,进行求差解算坐标。由于载波的精度远高于其内容(C/A码速率是1.023MHz,一个码的长度为977.5ns,即293m,而载波的速率是1575.42MHz,一个载波的长度是635ps,即19cm)。因此,载波相位差分可使定位精度达到厘米级甚至毫米级,广泛应用于移动站需要高精度定位的领域。常用的RTK定位技术分为常规RTK和网络RTK。
常规RTK
常规RTK定位系统包括:基准站、数据中心、数据通信网、移动站。基准站通过数据链路将自己所获得的载波相位观测值及站坐标实时播发给在其周围工作的移动站,移动站通过动态差分定位的方式,确定移动站相对于基准站的位置,并根据基准站的坐标得到自身的瞬时绝对位置。
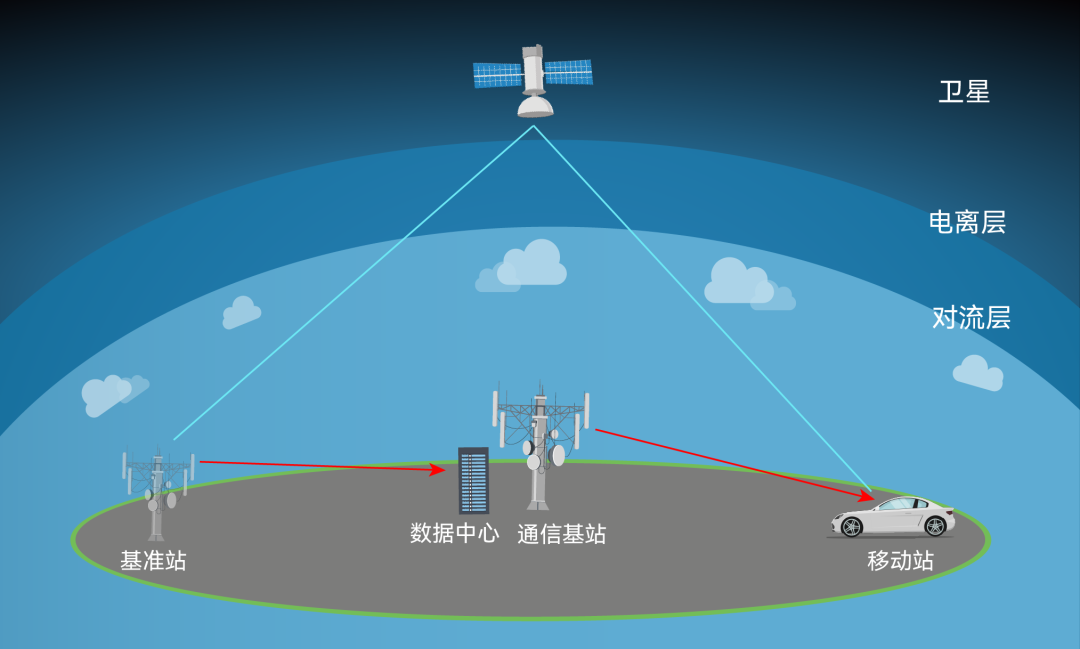
图4 常规RTK组网
基准站和移动站接收机时钟源稳定度越高,钟差越小,测算位置精度也越高。
常规 RTK定位技术虽然可以满足很多应用的要求,基于电离层、对流层延迟误差在一定范围内具有一致性,所以移动站与基准站的距离不能太远,定位精度可达分米级。
网络RTK
网络RTK定位系统包括:基准站网、数据处理中心、数据通信网络和移动站。其中基准站网由若干个基准站组成,每个基准站都配备有双频全波长GNSS接收机、数据通信设备等设备,通过长时间GNSS静态相对定位等方法,可以精确得到基准站的坐标,基准站GNSS接收机按一定采样率进行连续观测,通过数据通信网络将观测数据实时传送给数据处理中心,数据处理中心对各个站的数据进行预处理和质量分析,然后对整个基准站网的数据进行统一解算,实时估计出网内的各种系统误差的改正项(电离层、对流层和轨道误差),建立误差数学模型。

图5 网络RTK组网
基准站数量越多,接收机时钟源稳定度越高,数据中心建立误差数学模型越精准。同样,移动站接收机时钟源稳定度越高,测算定位精度越精准。
网络RTK技术与常规RTK技术相比,覆盖范围更广、成本更低、定位精度更高、用户定位的初始化时间更短,定位精度可以达到厘米级。
目前,高精度定位已广泛应用于导航定位、自动驾驶、智慧公交、车联网、车辆监管、智慧高速、道路安全监管、网约车监管、铁路监测、智能停车、智慧港口、智慧矿山、无人机植保、无人机航测、无人机物流、无人机监测、测量测绘、电网巡检、人员定位、桥梁监测、危房监测、可穿戴设备、高精度手机定位等领域。
从前面GNSS+RTK定位原理不难理解,基准站和移动站接收机时钟源钟差是高精度定位误差的主要来源之一。基准站时钟源稳定度越高,数据中心建立误差数学模型越准确;同时,移动站时钟源稳定度越高,结合误差数学模型修正量,最终测算自身定位精度也越高。
高精度定位应用越来越广泛,据GSA数据统计,GNSS设备预计2029年将达到28亿台。我们每个人都拥有一部手机,我们日常生活离不开手机定位业务,平均每人至少有1台GNSS电子产品,未来这是一个海量市场。与此同时,对时钟源要求也越来越高,不仅要求高稳定度、低相噪,同时也要求小型化、低功耗、低成本。
大普高稳时钟源产品,赋能高精度定位全方位解决方案
大普在时频领域深耕近20年,提供全系列高稳时钟源产品,包括:高稳时钟模组(Clock Module)、恒温晶振(OCXO)、温补晶振(TCXO)等系列,具有高精度、低相噪、低功耗、小尺寸、宽温区、高抗震、快启动等特点,关键性能指标位于国际领先地位,产品全部自主研发,从设计、制造、工艺、自动化测试等全部实现国产化、自主可控,为高精度定位应用提供全方位解决方案。

了解更多详情,欢迎来电垂询!
邮箱:sales@dptel.com
网址:https://www.dptel.com
总机:+86-0769-88010888
手机:+86-180-6899-8889