作者:麦姆斯咨询殷飞 ,文章来源:MEMS
3D传感技术可以帮助机器感知世界、绘制地图并实现与周围环境的互动。但机械式激光雷达(LiDAR)的尺寸缩小通常会受到机械式扫描仪的阻碍。基于焦平面开关阵列(FPSA)的3D传感器是固态激光雷达的希望之星,这是由于它们无需机械运动部件便能实现电子扫描。然而,目前基于FPSA的3D传感器分辨率常被限制在512像素甚至更低。
近年来,研发人员针对在宽视场角(FoV)中实现高速运行、高分辨率以及低功耗的集成光束扫描仪进行了深入的研究,这些特点是固态激光雷达的关键要求。光学相控阵(OPA)和焦平面开关阵列(FPSA)是固态激光雷达的两种常见光束操纵技术。
FPSA使用了类似可见光相机的光学系统,将视场角内的每个角度逐一映射到成像透镜后焦平面开关阵列上的像素单元。FPSA中的光开关网络并非在每个像素单元处整合测距单元。而是允许所有像素单元共享同一个(或多个)激光雷达测距单元,每个像素单元仅由一个光学天线和一个开关组成,这使得在单芯片上集成大阵列成为可能。
据麦姆斯咨询报道,美国加利福尼亚大学伯克利分校(University of California,Berkeley)电气工程和计算机科学系教授、伯克利传感器和执行器中心联合主任Ming C. Wu研究团队在Nature期刊上发表了以“A large-scale microelectromechanical-systems-based silicon photonics LiDAR”为主题的研究论文。
这项研究采用搭载了单片集成128 × 128像素MEMS FPSA(引线键合128 × 96子阵列,并经过了实验测试)的硅光子调频连续波(FMCW)成像激光雷达,最终分辨率达到16384像素。该系统采用5mm焦距的复合透镜,可以在70°×70°视场角内、以0.05°发散角和微秒级切换时间,将激光束随机定向到16384个不同的方向。这是迄今为止所报道的最大阵列的单片集成MEMS FPSA。将FPSA光操纵技术与FMCW测距方法相结合,可实现更清晰的3D成像与传感。这项研究中的FPSA具有高度可扩展性。在过去几十年中,摩尔定律推动了CMOS图像传感器的爆发式增长,类似摩尔定律的扩展也使百万像素3D成像激光雷达变成可能。
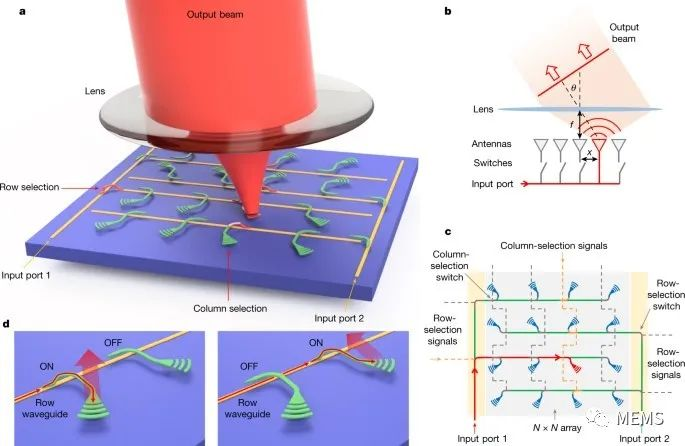
FPSA架构和工作原理
将FPSA与调频激光器和相干接收器相结合,构成了该研究中的成像激光雷达。该研究中FMCW测距系统的组件为片外连接,但其也可以集成在片上。采用迭代学习法获得预失真波形,利用直接调制型1550nm波长分布式反馈(DFB)激光器产生了偏移量8.6GHz、斜坡时间80 μs的线性频率啁啾。从目标对象返回的光与光电探测器处的参考光相混合。然后,利用傅里叶变换提取出与目标距离成比例的拍频。这项研究中主要采用单站配置,其中FPSA上使用了相同的光栅天线,主要用于发射FMCW调制光并接收来自目标对象的反射光。
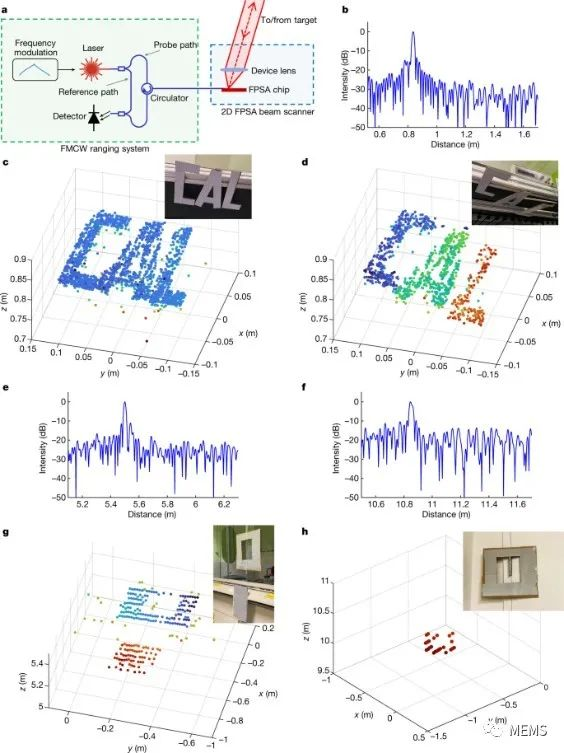
这项研究开发出的激光雷达的3D成像效果
为了进一步提高激光雷达的分辨率,可以通过增加芯片尺寸、缩小像素占位尺寸等方式实现。通过优化MEMS执行器和开关耦合器的设计,可以缩小当前像素的占位尺寸。FPSA的一个显著特点是,与马赫-曾德尔干涉仪(MZI)型热光开关不同,MEMS开关在OFF状态下的损耗几乎为零(其中唯一的损耗是波导传播损耗)。MEMS光开关是光通信网络中的常用技术,但这是该技术首次被应用于激光雷达;与热光开关相比,MEMS光开关体积较小、功耗低、开关快且光损耗非常低。这使得在高密度FPSA中保持低的光插入损耗成为可能。FPSA采用标准半导体制造工艺,可在商用CMOS代工厂实现量产。
FPSA激光雷达的另一项独特优势是其灵活性。视场角和角度分辨率可以通过选择不同焦距的成像透镜轻松调整,进而可以充分利用为各种各样焦距和CMOS图像传感器尺寸而设计和优化的相机镜头。例如,智能手机的相机镜头适用于小型FPSA芯片,以达到小尺寸和大视场角;而为专业相机设计的镜头则适用于大型FPSA芯片,以实现低发散和高角度分辨率;鱼眼镜头还可实现全180°甚至更大的视场角。